202 - Pico CoProcessor Interface (PCPI)
In Chapter 1 we’ve used the PicoRV32 implementation of a RISC-V. This implementation has a number of interfaces to the outside world. The memory interface was already discussed. In this section the Pico CoProcessor Interface (PCPI) is handled.
Multiplication coprocessor
To illustrate (the use of) a coprocessor, let’s take the multiplication. In the previous section it is illustrated how the compiler jumped in to achieve multiplication. Depending on the factors, this might take a lot time.
The PicoRV32 comes with an example multiplier in hardware. The design is shown in the image below.
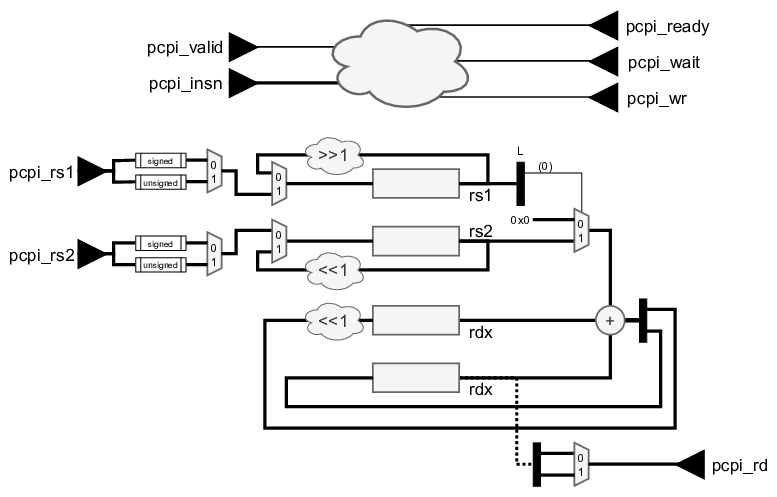
By now, most of the signals of the PCPI interface should make sense.
Control path
- pcpi_valid: a single bit signal that indicates the instruction is valid;
- pcpi_insn: a 32-bit instruction. This instruction is fetched by the PicoRV32 and handed over to the coprocessor (if needed);
- pcpi_ready: a single bit signal that indicates the coprocessor is done;
- pcpi_wait: a single bit signal that indicates the coprocessor needs more time;
- pcpi_wr: a single bit write enable signal to the PicoRV32.
Data path
- pcpi_rs1: a 32-bit bus containing the first factor;
- pcpi_rs2: a 32-bit bus containing the second factor;
- pcpi_rd: a 32-bit bus containing the product;
Consulting the readme file of the PicoRV32 learns:
- the instruction that is implemented through the coprocessor should be non-branching;
- the pcpi_valid signal only goes on for unsupported instructions;
- the pcpi_insn, pcpi_rs1 and pcpi_rs2 fields are parsed by the PicoRV32;
- the PicoRV32 core can optionally decode the pcpi_rd field of the instruction and write the value from pcpi_rd to the respective register.
- When no external PCPI core acknowledges the instruction within 16 clock cycles, then an illegal instruction exception is raised and the respective interrupt handler is called. A PCPI core that needs more than a couple of cycles to execute an instruction, should assert pcpi_wait as soon as the instruction has been decoded successfully and keep it asserted until it asserts pcpi_ready. This will prevent the PicoRV32 core from raising an illegal instruction exception
If all of the above rules are obeyed (which they are in the example), the PicoRV32 can offload all the mul instructions to the coprocessor. This option should be enabled in the PicoRV32 through the parameters: ENABLE_PCPI and ENABLE_MUL.
picorv32_inst00: component picorv32
generic map(
...
ENABLE_PCPI => '1',
ENABLE_MUL => '1',
...Balance
Running the code above, with the coprocessor present, gives the same result as the software-only variant. Lucky us !! 😃
Why should you go for one of both then ? That’s an important question and/or decision. To have some arguments in calling the shots, numbers can come in handy.
| software only | hardware + software | |
|---|---|---|
| filesize of .elf file (bytes) | 5'460 | 5'068 |
| duration of program (CC) | 467 | 404 |
| required LUTs | 897 | 1'205 |
| required registers | 574 | 868 |
- the software-only version needs more instruction memory. This makes sense as some additional, custom functions are generated to realise the multiplication.
- the version with the coprocessor finishes the job quicker.
- the software-only version requires less configurable resources (on FPGA)
With these arguments, better-informed decisions can be made.
- If the available instruction memory is of the utmost importance, some hardware offloading might be useful.
- For applications where the cost is the most important feature, having fewer hardware coprocessors might be interesting.